Рефераты по авиации и космонавтике
Рефераты по административному праву
Рефераты по безопасности жизнедеятельности
Рефераты по арбитражному процессу
Рефераты по архитектуре
Рефераты по астрономии
Рефераты по банковскому делу
Рефераты по биржевому делу
Рефераты по ботанике и сельскому хозяйству
Рефераты по бухгалтерскому учету и аудиту
Рефераты по валютным отношениям
Рефераты по ветеринарии
Рефераты для военной кафедры
Рефераты по географии
Рефераты по геодезии
Рефераты по геологии
Рефераты по геополитике
Рефераты по государству и праву
Рефераты по гражданскому праву и процессу
Рефераты по делопроизводству
Рефераты по кредитованию
Рефераты по естествознанию
Рефераты по истории техники
Рефераты по журналистике
Рефераты по зоологии
Рефераты по инвестициям
Рефераты по информатике
Исторические личности
Рефераты по кибернетике
Рефераты по коммуникации и связи
Рефераты по косметологии
Рефераты по криминалистике
Рефераты по науке и технике
Рефераты по кулинарии
Рефераты по культурологии
Рефераты по зарубежной литературе
Рефераты по логике
Рефераты по логистике
Рефераты по маркетингу
Реферат: Быстродействующий адаптивный наблюдатель в системе компенсации неизвестного запаздывания
Реферат: Быстродействующий адаптивный наблюдатель в системе компенсации неизвестного запаздывания
Настоящая работа посвящена построению системы компенсации неизвестного запаздывания. Наличие большого запаздывания, как известно [1], отрицательно сказывается на работоспособности системы управления.
Для компенсации неизвестного запаздывания разработана адаптивная система, состоящая из быстродействующего адаптивного наблюдателя, вычисляющего оценки неизвестных параметров и запаздывания системы управления, и прогнозатора Смита, компенсирующего это запаздывание.
Центральным моментом работы является построение алгоритма быстродействующего адаптивного наблюдателя для оценивания неизвестного запаздывания, так как прогнозатор Смита применим лишь в тех случаях, когда запаздывание априори известно. Этот алгоритм основан на использовании метода настраиваемой модели. Суть алгоритма изложена ниже.
Пусть поведение интересующего нас объекта описывается следующим дифференциальным уравнением:
![]() ,
(1)
,
(1)
![]() ;
; ![]()
Здесь
a1=3, a0=2 - известные постоянные коэффициенты; ![]() - неизвестные постоянные. Тогда
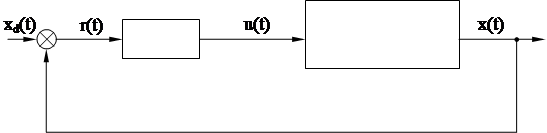
структурная схема соответствующего процесса управления будет иметь вид, представленный
на рис. 1. Здесь приборному измерению доступны вход xd(t) и выход x(t) системы управления.
- неизвестные постоянные. Тогда
структурная схема соответствующего процесса управления будет иметь вид, представленный
на рис. 1. Здесь приборному измерению доступны вход xd(t) и выход x(t) системы управления.
Построим
быстродействующий адаптивный наблюдатель для идентификации неизвестных
параметров системы ![]() , а также прогнозатор Смита для
компенсации запаздывания
, а также прогнозатор Смита для
компенсации запаздывания ![]() , после чего будем подставлять
получаемые наблюдателем оценки
, после чего будем подставлять
получаемые наблюдателем оценки ![]() в прогнозатор.
в прогнозатор.
![]()

–
Рис 1. Система управления для объекта с неизвестным запаздыванием.
![]()
y(t)
v(t) –
![]() +
+
–
![]()
![]()
–
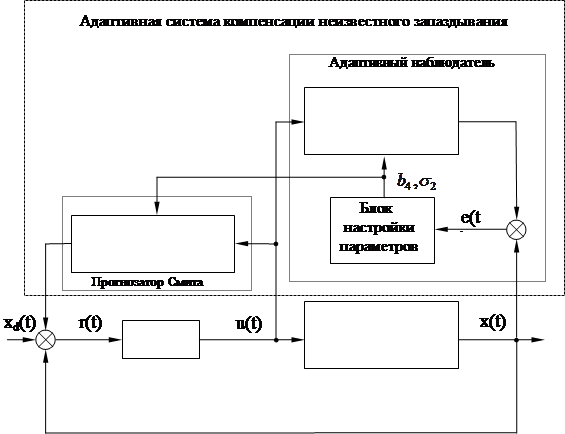
Рис. 2. Адаптивная система компенсации неизвестного запаздывания.
На каждом из подынтервалов времени функционирования системы Jj настраиваемую модель опишем следующими уравнениями:
![]()
![]() (2)
(2)
![]() ,
,
где
![]() -
параметры модели, настраиваемые соответственно на параметры
-
параметры модели, настраиваемые соответственно на параметры ![]() объекта (1).
объекта (1).
Введем ошибку e(t) = x(t) - y(t).
Конечная структурная схема системы управления с адаптивным наблюдателем и прогнозатором Смита показана на рис. 2.
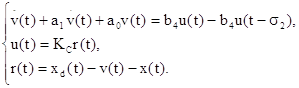
Система уравнений для выходного сигнала прогнозатора Смита v(t) и входного сигнала объекта, прогнозатора и наблюдателя u(t):
Уравнение для ошибки e(t) будет иметь вид (вычитаем (2) из (1) и линеаризуем правую часть):
![]() ,
(3)
,
(3)
где
![]()
![]()
Приведем (3) к системе уравнений первого порядка. Положим
![]()
![]()
Тогда в векторной форме уравнение (3) будет иметь вид
![]()
![]()
![]() +
+![]()
![]() (4)
(4)
или в краткой форме
![]() ,
,
где ![]() ,
, ![]() , A=
, A=![]() , Z=
, Z= ![]() .
.
Решением (4) будет
![]()
![]()

![]()
![]() (5)
(5)
или в краткой форме
![]()
где
Ф(t)= ![]() , R(t)=
, R(t)= ![]() - решения уравнений
- решения уравнений
![]() (6)
(6)
![]() . (7)
. (7)
Перепишем первую строку системы (5) в виде
![]() (8)
(8)
где
![]()
![]()
![]() .
.
Здесь
w(t) и ![]() - известные
величины для любого t; вектор g содержит неизвестные параметры объекта, а векторы bj (j=0,l,...,N-l) являются функциями перестраиваемых параметров эталонной
модели
- известные
величины для любого t; вектор g содержит неизвестные параметры объекта, а векторы bj (j=0,l,...,N-l) являются функциями перестраиваемых параметров эталонной
модели ![]() .
.
Набирая данные на каждом из подынтервалов Jj в моменты времени tj1,...,tjm, образуем из (8) алгебраическую систему вида
![]()
или в матричной форме
![]() (9)
(9)
Число m выбирается так, чтобы уравнений в (9) было не меньше числа неизвестных параметров. В данном случае m больше или равно 3.
Решение алгебраической системы (9) при этом записывается в виде
![]() (10)
(10)
где
![]() -
псевдообратная матрица.
-
псевдообратная матрица.
Изменение параметров bj при переходе от подынтервала Jj к Jj+1 осуществляется по рекуррентной формуле
![]() ,
(11)
,
(11)
где
L=diag(l1,....,l3) -
вещественная диагональная матрица, все числа li>0. Можно показать [2], что этот процесс перестройки параметров
сходится экспоненциально, т.е. значения перестраиваемых параметров модели ![]() сходятся к
значениям неизвестных параметров объекта
сходятся к
значениям неизвестных параметров объекта ![]() .
.
Таким
образом, для того, чтобы идентифицировать постоянные неизвестные параметры ![]() объекта (1),
параметры настраиваемой модели (2)
объекта (1),
параметры настраиваемой модели (2) ![]() следует изменять с помощью
алгоритма, который описывается уравнениями (6)-(11).
следует изменять с помощью
алгоритма, который описывается уравнениями (6)-(11).
Было проведено численное моделирование этой системы на ЭВМ в среде MATLAB 5.2. Результаты компьютерного моделирования подтверждают эффективность разработанного алгоритма.
Предлагаемый алгоритм адаптивного наблюдателя обладает важными для практики свойствами: заданной длительностью переходного процесса по параметрам и запаздыванию; отсутствием взаимного влияния переходных процессов настройки в разных параметрических каналах и практической независимостью времени переходных процессов по параметрам и запаздыванию от изменения амплитуды входных и выходных сигналов.
Список литературы
[1] Гурецкий X. Анализ и синтез систем управления с запаздыванием. Пер. с польского. - М.: Машиностроение, 1974.
[2] Копысов О.Ю., Прокопов Б.И. Построение алгоритма перестройки параметров и запаздывания в методе настраиваемой модели. М.: МГИЭМ, 1999.
3. А.В. Старосельский, Московский Государственный Институт Электроники и Математики, быстродействующий адаптивный наблюдатель в системе компенсации неизвестного запаздывания
Для подготовки данной работы были использованы материалы с сайта http://www.refcentr.ru/